
Debris Removal Attachment (DRA)
Link to pdf here.
| Outcome | Develop a machine as a removable truck attachment to collect garbage bags placed on roadsides by litter cleanup crews, with the added feature of lifting up to a 100lb single object, such as a deer carcass. |
| Benefit | Improves safety of workers collecting trash bags. Reduces worker exposure to traffic by allowing bag pickup without leaving vehicle. Reduces worker lifting injuries. Does not require a dedicated vehicle. Reduces costs and improves productivity. |
DRV Short Demo
AHMCT researchers developed a prototype machine with the main purpose of collecting garbage bags placed on the roadway by cleanup crews. The machine will attach to trucks in the Caltrans fleet and will be mountable on either side of the truck with minimal modifications and impact to the truck’s current functions. This will allow one unit to be removed, swapped between sides, and even swapped between other trucks. The reduced cost of using current trucks will allow multiple units to be purchased, simultaneously increasing productivity, reducing costs, and reducing worker exposure to traffic hazards.
The machine is normally operated from the truck cab which will reduce worker exposure to traffic. It will assist workers by lifting heavy items into the truck bed.
Why We Are Pursuing This Research
Development and deployment of the DRA and similar machines improves safety of highway workers by reducing their exposure to traffic.

The primary method for removing garbage bags and debris from the roadway is by manual labor. Typically two workers will use a ¾ ton truck to collect the bagged litter deposited at the road edge by litter collection crews. The truck pulls over next to the bags and a worker exits the vehicle to throw the bags into the back of the truck. Since the time spent at any location is minimal, no shoulder closure can be placed. Workers are on foot at the road edge and vulnerable to hazards associated with passing traffic. They are also subject to physical injuries such as those associated with lifting and tripping.
Other debris removal methods previously developed include the Debris Removal Vehicles (DRVs). These increased productivity and worker safety by removing workers from the roadside. However, because they are dedicated vehicles, they are expensive to purchase, maintain, and operate. The complexity of the DRV may require dedicated operators which can be a hindrance to implementation within typical maintenance operations. Caltrans is continually seeking safer and more effective methods for removing debris from roadsides.
What We Are Doing
The two main design goals for this project are:
- Develop a simple and low cost solution to collect the trash bags from the road edge.
- Integrate the solution as an nonintrusive attachment to trucks in the Caltrans fleet
AHMCT researchers developed a concept and prototype to satisfy these design goals. The prototype is being tested at AHMCT facilities for its effectiveness and satisfaction of the design goals. The next steps in development are user evaluation and field testing.
Description

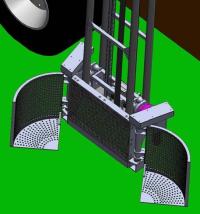
The unit employs an independent positive grip clam system which allows for stopped and moving debris collection (Figure 2). The clams are on a shuttle which moves on a vertical track (Figure 3). At the top of the track the unit rotates and dumps the payload into the truck bed.
In the configuration shown, the DRA is installed outside of the truck bed. It will pose a minimal impact to the truck’s other functions and extends only 8” from the truck bed. The grip system is stowed at the top and hangs out of the way over the bed. Various quick disconnect or semi-permanent mounting options are possible. The track system can be built to various lengths to accommodate different truck heights. The DRA is powered by the truck’s 12V electrical system.
The unit is remote controlled and normally operated from inside the truck cab when collecting trash bags. When necessary the operator can operate the unit from outside the cab to collect awkward heavier items. It will have minimal components and functions which will make it simple and cost-effective to build, maintain, and operate. The system will lift garbage bags and other medium debris such as deer carcasses up to 100 lbs.
Current Status
The next steps in development are user evaluation and limited field testing. AHMCT researchers with Caltrans will test and evaluate the DRA for effectiveness, ease of operation, and reliability with respect to the design goals and maintenance needs.
For Additional Information
| Bob Meline Caltrans Project Manager | bob_meline (at) dot.ca.gov | (916) 227-7031 |
| Steve Velinsky Principal investigator | savelinsky (at) ucdavis.edu | (530) 752-4166 |
| Will White Primary contact | wawhite (at) ucdavis.edu | (530) 752-1455 |
This document is disseminated in the interest of information exchange. The contents do not necessarily reflect the official views or policies of the AHMCT Research Center, the University of California, the State of California, or the Federal Highway Administration. This document does not constitute a standard, specification, regulation, or imply endorsement of the conclusions or recommendations.
(rev. July 2011)