Wireless Network Sends Real-Time Kinematic GPS Differential Signals Enabling New Applications
Link to pdf here.
AHMCT researchers are developing a wireless network-based approach for delivering precision GPS differential correction signals to vehicles. This system enables novel applications requiring decimeter or centimeter-level accuracy, and removes the need for a dedicated RF license. It leverages emerging wireless standards and infrastructure. In addition, the significant remaining bandwidth can support many other applications, such as using vehicles as probes for traffic management.
Why We Are Pursuing This Research
Precision vehicle location information is a key enabling technology for many advanced construction and maintenance activities. For example, driver assistance relies on such information to support low- to no-visibility operation. Precision positioning information can support many other forms of advanced robotics and automation for construction and maintenance—it will greatly benefit many other transportation modes, including emergency response and safety vehicles, commercial vehicle operations, public transit, and the traveling public. However, existing technologies suffer from a number of drawbacks. These issues, addressed in this research, include significant impact on roadway infrastructure, difficulty of installation, impact on RF spectrum, and high cost of equipment and licensing or installation.
What We Are Doing
AHMCT researchers are developing an architecture and prototype system to deliver high-accuracy GPS differential correction signal over a cell-like wireless network. The system is designed to use the emerging Dedicated Short Range Communications (DSRC) standard, so that DSRC-equipped vehicle would be able to receive the signal anywhere in the country. The prototype development system uses the 802.11 standard commonly used for wireless networking in businesses and homes. However, the software is developed in a manner that is essentially independent from the choice of communications hardware. The first generation research prototype development targets decimeter or centimeter-level accuracy, with low-cost base and vehicle units, and low-power communication using license-free RF spectrum.
The system includes roadside differential base stations and communications (referred to as GPS Access Points or GAPs), along with mobile units to exploit the roadside units. Availability of this system could greatly enhance the ability to precisely, efficiently, and safely build and maintain highway infrastructure. The system can provide real-time differential corrections for use in vehicle guidance and control for both maintenance and construction. In addition, the system can support DOT surveying operations. Precision positioning information would improve the quality and consistency for many tasks—it may also reduce exposure time for workers. In some cases, it will facilitate use of robotics and automation such that worker exposure is eliminated completely, thus contributing to the safety of the worker and the traveling public. Increased operational efficiency could further benefit the traveling public through reduced or eliminated lane closures.
The system has been designed for use in both urban and rural areas, with very lower power use, based on the constraints of rural deployment. Additional issues of GPS signal availability, system hardware and software security, and maintainability have been considered.
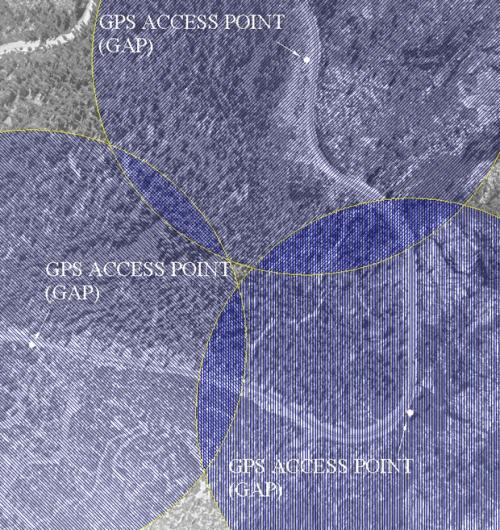
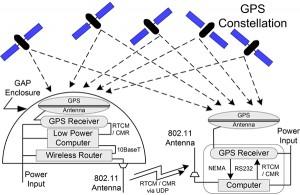
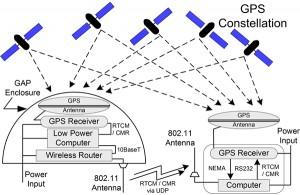
For the roadside GAP, GPS sensors would be installed in or near the highway right-of-way (e.g. roadside or median), but out of the flow of traffic. The location (latitude, longitude, altitude) of these sensors is surveyed during installation and entered into the roadside unit. With the unit integrated into the Caltrans network backbone, the unit could be programmed and updated remotely—this capability does not exist in the prototype unit, but future software development work in cooperation with Caltrans could enable this aspect. The GAP features wireless communications to provide GPS correction information to nearby vehicle receivers. One commercially available communications technology has been used in the prototype system—the IEEE 802.11 standard for wireless local area networking. This system is closely related to the DSRC standard emerging for Intelligent Transportation Systems (ITS). The current wireless transmission range for such systems may be up to several hundred yards, but emerging standards may enable much wider communications range. GAP coverage will overlap to provide continuous availability of the differential correction. The GAP provides an industry-standard differential correction signal, and supports both RTCM and CMR protocols. In essence, each GAP derives it’s current location based on GPS satellite signals, determines an error based on its known surveyed position, and provides this error vector to any local receiver (vehicle or surveyor) units, thus supporting real-time enhanced accuracy applications.
A similar configuration is used in the in-vehicle (or rover) system, which includes a GPS receiver coupled with 802.11-compliant communications. The vehicle receiver establishes a connection with the optimum local GAP based on received signal strength. To improve the rover location accuracy and robustness, the GPS unit can be augmented by an Inertial Measurement Unit (IMU) for applications requiring high accuracy, redundancy, and continuous availability.

With the GAP units coupled to a wide-area network, the significant available bandwidth can be used to support additional applications, so long as this is done in a way to guarantee timely delivery of the differential correction signal. These applications could include use of vehicles as real-time traffic probes, as well as communications of incident and work zone information to in-vehicle units. Since the differential signal consumes very little of the available bandwidth, the range of applications for the communication channel is large.
The Researchers Recommend
The system is in active development through the spring of 2004. Initial proof-of-concept testing was successfully completed in September, 2002. Researchers will validate the final prototype system at AHMCT’s on-campus test facilities, and provide final documentation and reporting early in the summer of 2004. Such a network-based system for providing low-cost and high-accuracy GPS differential corrections holds great promise for enhancing the accuracy, safety and efficiency of current and emerging applications. The additional available bandwidth can support real-time vehicle-as-probe for traffic management, and any other mobile applications requiring high bandwidth. The system is adaptable to local terrain, and robust with respect to single-point failures. It provides a high-accuracy position sensing system with no impact on roadway infrastructure, and without a fixed-frequency FCC license. Because of the standards-based approach of the current research, commercial prospects are promising for this system.
For Additional Information
| Larry Baumeister Caltrans Project Manager |
[email protected] | (916) 227-5835 |
| Ty A. Lasky Research engineer for this project |
[email protected] | (530) 752-6366 |
| Kin S. Yen Primary contact for this project |
[email protected] | (530) 754-7401 |
| Bahram Ravani Principal investigator for this project |
[email protected] | (530) 754-6130 |
This document is disseminated in the interest of information exchange. The contents do not necessarily reflect the official views or policies of the AHMCT Research Center, the University of California, the State of California, or the Federal Highway Administration. This document does not constitute a standard, specification, regulation, or imply endorsement of the conclusions or recommendations.
(rev. April 2004)